
Intelligent Vehicle
Intelligent Vision-Based Vehicle Detection and Tracking System for Automotive Applications
Owing to the maturity of vision sensors, vision-based systems play an essential role in many vehicular applications. Intelligent Cruise Control (ICC) provides semi-automatic driving mechanism. Collision Warning Systems (CWS) prevent vehicles from sudden crashes. These applications require detection and tracking of on-road vehicles to estimate distance between host and preceding vehicles or to monitor vehicles¡¦ behaviors on different lanes.
We present an intelligent vision-based on-road preceding vehicle detection and tracking system based on computer vision techniques. Pre-processing video stabilization is adopted to improve system reliability and stability. High performance detection is achieved via the machine learning-based method. Our framework is favored for various automotive applications, which yields above 90% detection rate in long range and 99.1% tracking successful rate in middle range.
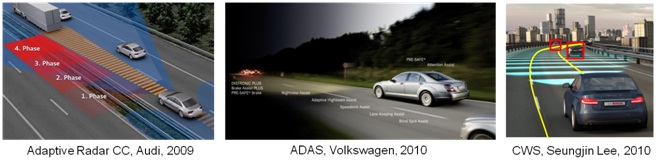
Fig. 1 Develop a powerful vision-based sensing system for various vehicular applications, including intelligent cruise control (ICC), advanced driver assistance system (ADAS), Collision warning system (CWS).
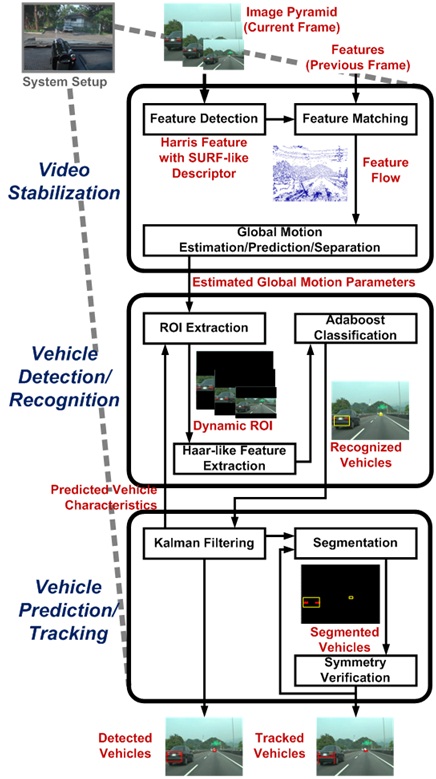
Fig. 2 System flow diagram.
![]()
Fig. 3 Detection without stabilization.
![]()
Fig. 4 Detection with stabilization.
![]()
Fig. 5 Detection in various situations.
![]()
Fig. 6 Tracking outcomes.
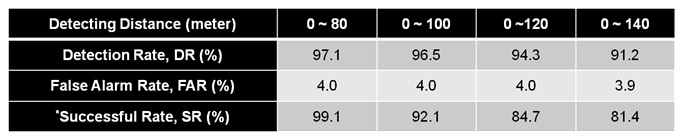
Fig. 7 Accuracy comparison with respect to detecting distance.
Algorithm and Architecture Design of A Knowledge-Based Vehicle Tracking
We exploit a vision-based intelligent vehicle cruise control system from the application level to the architecture level. Firstly, design considerations of the system are addressed in both computing power and accuracy aspects. Secondly, we present an efficient knowledge-based front-vehicle tracking algorithm. The algorithm yields below 5% error rate that outperforms the state-of-the-arts. Thirdly, a run-length-based algorithm optimization flow is introduced. Finally, specific hardware architecture is developed. It achieves 1280x960/80FPS and 4096x2160/10FPS requirements for multi-vehicle tracking tasks.
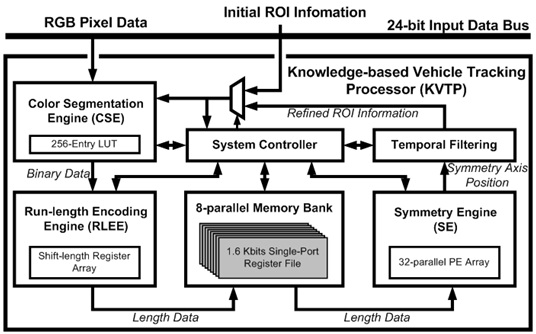
Fig. 8 Proposed knowledge-based vehicle tracking processor.
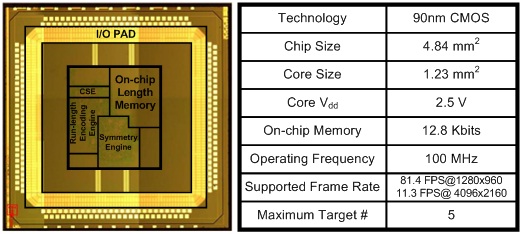
Fig. 9 The die micrograph and performance summarization.
Related Publications
[1] Yi-Min Tsai, Keng-Yen Huang, Chih-Chung Tsai and Liang-Gee Chen, "Learning-based Vehicle Detection Using Up-scaling Schemes and Predictive Frame Pipeline Structures", in IEEE International Conference on Pattern Recognition (ICPR), Istanbul, Turkey, August 2010.
[2] Yi-Min Tsai, Keng-Yen Huang, Chih-Chung Tsai and Liang-Gee Chen, "An Exploration of on-road Vehicle Detection Using Hierarchical Scaling Schemes", in IEEE International Conference on Image Processing (ICIP), Hong Kong, Sep. 2010.
[3] Yi-Min Tsai, Chih-Chung Tsai, Keng-Yen Huang and Liang-Gee Chen, "Algorithm and Architecture Design of a Knowledge-based Vehicle Tracking for Intelligent Cruise Control", in IEEE International Conference on Multimedia and Expo (ICME), Barcelona, Spain, July 2011
[4] Yi-Min Tsai, Chih-Chung Tsai, Keng-Yen Huang and Liang-Gee Chen, "An Intelligent Vision-based Vehicle Detection and Tracking System for Automotive Applications", in IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, U.S.A, Jan. 2011.