國立台灣大學系統最佳化實驗室研究簡介
設計是一連串策略決定的過程。在產品設計的初期,設計工程師必須制定許多產品或系統的規格,一旦制定,這些規格也深深影響產品的製作成本、使用時期的長短及期間內的性能表現、乃至於回收或再利用的容易程度。根據文獻顯示,70%的製造成本及產品性能取決於設計初期所作的決定,也因此工程師必須在最多資訊的情況下做最佳的設計決策。
好的設計不僅要滿足基本的要求標準,還必須確保性能及品質達到最佳化。「系統最佳化實驗室」成立之宗旨乃是以完善的數學、統計及機械設計的理論基礎,以最佳化的角度,提供系統化的全方位設計藍圖。
本實驗室目前研究重點有:
<可靠度最佳化設計>
環境及使用時的各種不確定因素會嚴重影響產品性能與品質,可靠度最佳化設計除了提供有效及快速的可靠度分析方法,也整合最佳化演算法與可靠度分析方法,使工程師在產品設計初期便可預測其在使用時的性能表現及可靠度,即時做最有效的設計變更,減少設計後期所要做的改變,降低產品成本。
<複雜系統整合與設計>
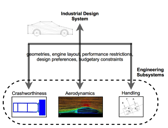
工程問題往往錯綜複雜,如汽車和飛機等,這樣的複雜系統所涵蓋的元件數目龐大,無法做整合型設計。本實驗室使用先進的多層系統設計方法,將複雜系統分解成許多次系統及元件之組合,各次系統間獨立運作,不但可達到平行處理,增加時效,次系統間也互相合作達到最終之設計目標。
<多目標與多領域設計>
除了工程上的性能考量外,完善的設計還須涵蓋環保,人體工學,美學,及其他各種不同領域的考量。這樣的跨領域設計是近年來許多研究人員面臨的課題,除了模型的建構、資訊的傳遞之外,不同領域設計的整合也日益複雜。而各領域之間所追求目標之間的取捨,及如何有效率的解決多目標最佳化問題,也是我們研究的主軸。
在基本理論研究外,本實驗室也配合大學部課程``機械設計''帶領成功大學機械系三年級學生了解機械設計過程與重點,並進行專題競賽方式帶領學生,實際體會從概念藍圖至製造完成的過程所會遇到的挑戰,利用所學的力學、材料、及機構等的專業知識,透過此專題做最有效的整合。
感謝行政院國家科學委員會、成功大學、台灣大學、台達電子工業股份有限公司、金屬工業研究發展中心,溢泰實業股份有限公司,及台糖公司對系統最佳化實驗室的贊助。
下載詳細研究介紹
可靠度最佳化設計
應用領域
汽車設計,機構分析與設計,電子元件壽命評估,疲勞設計,高壓容器外型設計,製造程序與改善,政策規劃與評估,產品生命週期影響評估
複雜系統最佳設計
背景
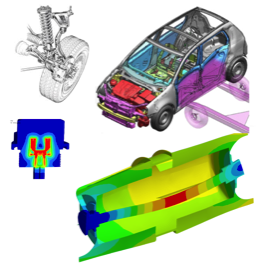
複雜系統為一個由許多相互連結的元件或次系統所組成的大型系統,亦稱為大尺度系統,常見的複雜系統如汽車或航空器等。複雜系統往往無法找 到單一模型來完整的模擬全系統的性能,即使這樣的模型存在,龐大的運算量導致無法利用該模型進行最佳設計。因此工程師需要獲得系統內各元 件或次系統的資訊,將複雜系統拆解成多個相關聯的次系統,由次系統的最佳行為推導出整體系統最佳設計。
應用領域
複雜系統為一個由許多相互連結的元件或次系統所組成的大型系統,亦稱為大尺度系統,常見的複雜系統如汽車或航空器等。複雜系統往往無法找 到單一模型來完整的模擬全系統的性能,即使這樣的模型存在,龐大的運算量導致無法利用該模型進行最佳設計。因此工程師需要獲得系統內各元 件或次系統的資訊,將複雜系統拆解成多個相關聯的次系統,由次系統的最佳行為推導出整體系統最佳設計。
應用領域
- 汽車整車設計
- 電子產品綠色設計
- 複雜結構設計
- 公差分析與配置
- 誤差累積

解析目標層遞法
由汽車工業發展出來的解析目標傳遞法 (Analytical Target Cascading,簡稱ATC) 是一種用來處理複雜系統的設計方法;此方法將複雜系統拆解為多層架構,並允許此架構中的上層系統將目標傳遞至下層系統,以獲得整 體系統的最佳近似解。在取得整體系統 之設計目標後,此法之運作流程如下:
由汽車工業發展出來的解析目標傳遞法 (Analytical Target Cascading,簡稱ATC) 是一種用來處理複雜系統的設計方法;此方法將複雜系統拆解為多層架構,並允許此架構中的上層系統將目標傳遞至下層系統,以獲得整 體系統的最佳近似解。在取得整體系統 之設計目標後,此法之運作流程如下:
- 將系統適當的拆解成多層系統;
- 建立次系統模型;
- 改寫各次系統的目標函數以符合ATC形式;
- 分別對各子系統進行最佳化求解,並藉由系統間的訊息傳遞與溝通協調,求得整體系統的最佳解。
多目標與多領域設計
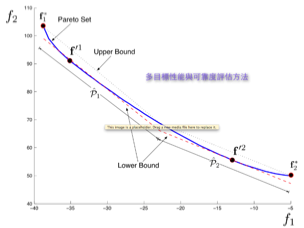
在單目標最佳化的問題裡,我們雖然可以找到使目標最好的設計,但在往往需改善的目標不只一個,例如在機器的設計上,除了使性能最佳之外, 成本的考量也十分重要,多目標最佳化便是以有組織的方式解決此種工程 問題的方法。完全不考慮決策者偏好的方法 在決策者對目標函數的了解不明確,沒有辦法偏好於任何一個目標函 數時,此類的選擇是很適合用來求解的方法。
多目標最佳化與公差配置
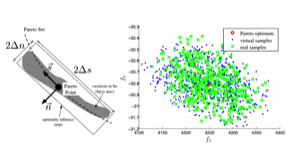
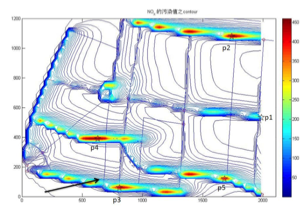
本研究提出一設計流程來獲得數個多目標設計最佳點,並依據各點性能受不確定因素影響之狀況定義一影響範圍將其量化。藉由影響範圍量化方法,設計者能得知各個設計點之系統性能變動情況。透過最佳影響範圍面積之計算,設計者能量化各個設計點之性能變動範圍大小;而最佳影響範圍中沿多目標Pareto set之方向及遠離Pareto set之方向分別定義為訊號及雜訊,此訊號/雜訊比能指出設計點在不確定因素的影響下,其性能表現是否仍能符合Pareto set之趨勢。
機器手臂設計與規劃
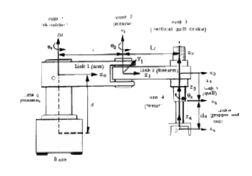
現今在工程應用上,機械手臂的使用相當廣泛,而機械手臂的路徑規劃不但影響到工作完成的效率,更會影響到精準度,由外在環境或是人為造成的不確定因素而產生的幾何公差是不能被忽略的。本研究包含機械手臂在不確定因素下靜態與動態之研究。在考慮機械手臂受力下產生的形變以及終端位置點的路徑偏差的情況下,便能夠制定出機械手臂的幾何公差最佳配置。
其他研究領域
針對軟體模擬之演算法開發
法規制定與規範